隊列走行の2号車などで使用する車線維持制御。白線を認識、先頭車または先行車への追従走行、車線維持、車線変更を行う機能。ミリ波レーダー、LiDER、GPSセンサーを駆使し、ECUの計算により、白線未検出時や、車線変更時にも、先頭車と自車の誤差を検出し先頭車をトラッキングする
システム構成
① カメラ:白線認識
② LiDAR: トラッキング制御技術:レーザーを照射することで、離れた物体までの距離を正確に
③ RTK-GPS:相対測位・衛星測位システム。「リアルタイムキネマティック(Real Time Kinematic)」の省略形で、固定局と移動局の2つの受信機で4つ以上の衛星から信号を受信する。2つの受信機の間で情報をやりとりしてズレを補正することで、単独測位のGPSよりも精度が高く、誤差は数センチメートル以内
④ ECU
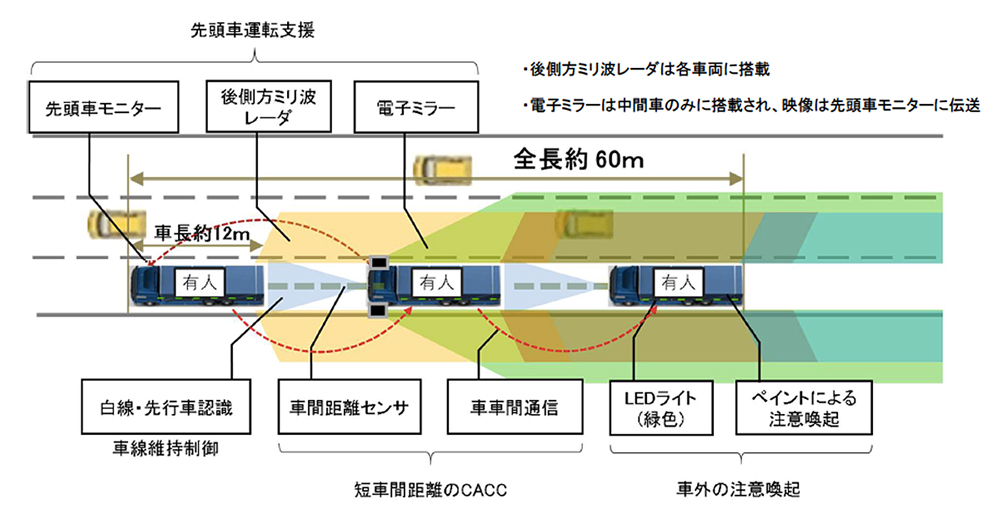
画像は後続車無人システム (出典:国土交通省)