先頭車運転支援システム
隊列走行の最終車などで使用する後側方視界補助システム。 先頭車に後続車の後側方のカメラ画像やミリ波レーダーによる障害物検知情報を先頭車に表示し、先頭車が車線変更する際のドライバーの視界を支援する。 システム構成 ① カメラ:3号車後側方視...
日本のモノづくり企業を元気にする
隊列走行の最終車などで使用する後側方視界補助システム。 先頭車に後続車の後側方のカメラ画像やミリ波レーダーによる障害物検知情報を先頭車に表示し、先頭車が車線変更する際のドライバーの視界を支援する。 システム構成 ① カメラ:3号車後側方視...
隊列走行の2号車などで使用する車線維持制御。白線を認識、先頭車または先行車への追従走行、車線維持、車線変更を行う機能。ミリ波レーダー、LiDER、GPSセンサーを駆使し、ECUの計算により、白線未検出時や、車線変更時にも、先頭車と自車の誤差...
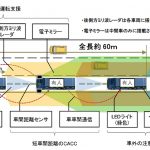
協調型車間距離維持支援システム(CACC:Cooperative Adaptive Cruise Control)は、隊列走行の2号車などで使用する。 従来の ACCオートクルーズシステム で用いられている先行車との車間距離情報に加え、車車...
短車間距離(最長 10m)で、電子的に連結して走行するシステム。 後続車無人システムともいう。物理的な連結がなく、有人の先頭車が、無人のトラック、1 台または複数台を従えて走るシステム。トラックドライバーの不足に対応する。 2号車に、協調型...