協調型車間距離維持支援システム(CACC:Cooperative Adaptive Cruise Control)は、隊列走行の2号車などで使用する。
従来の ACCオートクルーズシステム で用いられている先行車との車間距離情報に加え、車車間通信(760MHzITS 通信)によって、先行車の加減速制御情報を取得し、加減速制御に用いることで、従来の ACCオートクルーズシステムよりも応答遅れや車間距離の変動が少ない走行を可能にする。
またLKA(車線逸脱防止支援システム)との併用により、高速道路運転時に道路白線をカメラで認識し、ステアリングを制御することで、車線に沿った走行ができる。
システム構成
① 車間距離センサー3種(ミリ波レーダー+LiDER+RTK-GPS )
② 多重化車車間通信システム(760MHz、4GLTE、光車車通信)、途切れない車車間通信システム
③ ECU
(注)RTK-GPS:高精度衛星測位システム。「リアルタイムキネマティック(Real Time Kinematic)」RTK-GPSでは固定局と移動局の2つの受信機を使用する。4つ以上の衛星から信号を受信し、2つの受信機の間で情報をやりとりすることで、ズレを補正する。単独測位のGPSは受信機は1つで、誤差5~10mと大きく、自動運転には不向きだが、相対測位のRTK-GPSは、誤差は数センチメートル以内と精度が高く、走行レーンも認識できる。
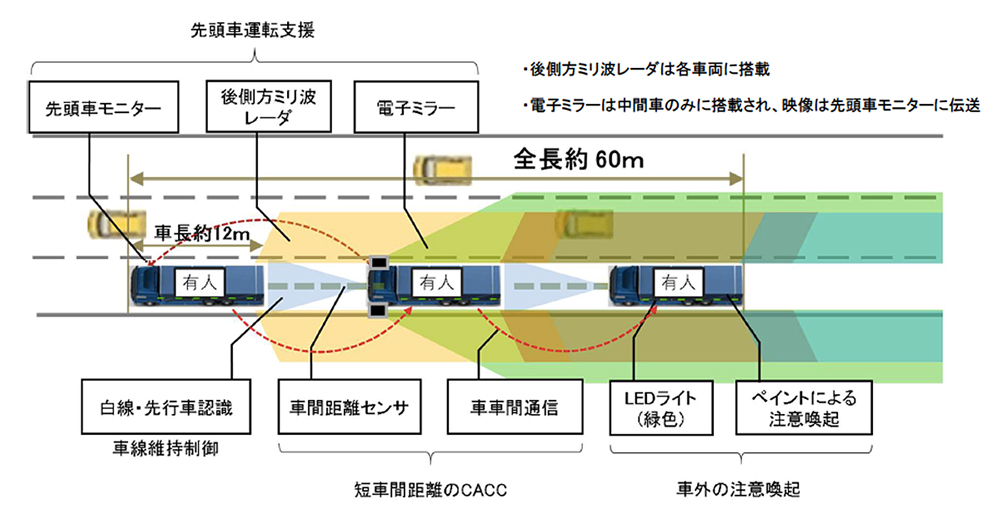
画像は後続車無人システム (出典:国土交通省)