
車載ソフトウェア
自動車は従来の機械式の制御から、ECU(電子制御ユニット)を搭載し、ソフトウェアによる電子制御を行う仕組みが増加している。 現在では一台の自動車に搭載されているECUの数は、多い場合には100個を超える車種もあり、1,000個以上の半導体チ...
日本のモノづくり企業を元気にする
自動車は従来の機械式の制御から、ECU(電子制御ユニット)を搭載し、ソフトウェアによる電子制御を行う仕組みが増加している。 現在では一台の自動車に搭載されているECUの数は、多い場合には100個を超える車種もあり、1,000個以上の半導体チ...

無線データ送受信技術。ネットワーク経由で、車に搭載されている電子制御ユニットのソフトウェアを更新する技術。 従来の車両では、ハードウェアとソフトウェアが密接に結びついており、機能の変更や追加には物理的な改造が必要で、車載ソフトウェアの更新は...
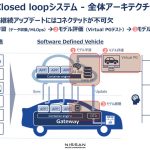
SDV:ソフトウェア・デファインド・ビークル(Software-Defined Vehicle)は、コネクテッドカー(Connected Car)技術。情報通信装置を備え、自動車の機能や性能をソフトウェアで定義し、アップデート可能な車両のこ...
SDV=ソフトウェア・デファインド・ビークル(SDV: Software-Defined Vehicle)は、コネクテッドカー(Connected Car)技術。情報通信装置を備え、自動車の機能や性能をソフトウェアで定義し、アップデート可能...

RTK-GPSは乗用車の自動運転システムや、後続車無人システム(隊列走行システム)で使用する。 単独測位GPSも相対測位RTK-GPSも4つ以上の衛星から信号を受信することは同じ。しかし、GPSでは受信機は1つだが、RTK-GPSでは固定局...

自動運転では不可欠となる、高精度3次元地図データ(HDマップ、High-Definition map)は、事前に撮影した膨大な容量の高精度3次元点群データを基に「図化技術」で生成した構造物を収録。 高精度3次元地図はセンチメートル単位の精...

マップポジショニングユニット(MPU:Map Positioning Unit)は、衛星測位や慣性航法等により自車位置を高精度に算出する。自車周辺地図情報や、目的地までの車線レベルの推奨経路情報をAD/ADAS ECUに出力し、車両統合制御...

車載ECUは過去にシステムが開発される毎に一つ一つ、目的別に開発されてきた。増えすぎたECUは、高級車では100個以上搭載される異常な状況になっている。そのため、すでにECUの整理統合が始まっている。自動車メーカーでは、今後、2025年頃ま...

ADAS(先進運転支援システム)とAD(自動運転)の違いは、人の運転への関与度合いの違い。ADASは人の意思を優先し、ドライバーの安全な運転をサポートするが、ADは人が運転に関与せずとも、自動車の判断のみで目的地までたどり着くことを目的とし...
ADAS(先進運転支援システム)とAD(自動運転)の違いは、人の運転への関与度合いの違い。ADASは人の意思を優先し、ドライバーの安全な運転をサポートするが、ADは人が運転に関与せずとも、自動車の判断のみで目的地までたどり着くことを目的とし...

車両と歩行者の接近を検知するために、人とその他障害物を区別して、歩行者に対して危険がある場合、運転席内に、警報アラートブザー、モニター警告灯を点灯させ、危険を知らせる。 衝突までの時間を算出し,その時間によって警告のみとするか,ブレーキ制御...

交差点重視型(ステレオカメラ+単眼AI式カメラ)と高速重視型(長距離300m+中距離120m+短距離30m)の2種類が上市されている <見通しの悪い交差点重視型> ステレオカメラの下側中央部分にステレオカメラよりも広角な単眼AI式カメラが...

水平画角約64度程度。ステレオカメラは左右の画像の立体視処理により、複数の立体物の大きさ、位置、速度を瞬時に検出する3次元外界認識センサー。白線や黄線などの車線の差異や、落下物、路面の凹凸をも的確に検出することが可能。先進運転支援システムの...

水平画角128度程度。ステレオカメラの約2倍の広角で撮影できる。コストや小型化を重視する場合に単眼カメラを使用する。 画像処理「単眼カメラ距離計測技術」によって、AI、ディープラーニングを活用して、被写体までの距離を計測している。正解とな...
100m前方の障害物を認識する。弱点は夜間と悪天候(霧や雪)。前方ミリ波レーダー77GHzとの組み合わせで使用することが多い。 車載カメラは近年の画像処理技術の進化により、直接自動車を制御するための入力センサーとして、「センシングカメラ」...
隊列走行の最終車などで使用する後側方視界補助システム。 先頭車に後続車の後側方のカメラ画像やミリ波レーダーによる障害物検知情報を先頭車に表示し、先頭車が車線変更する際のドライバーの視界を支援する。 システム構成 ① カメラ:3号車後側方視...
隊列走行の2号車などで使用する車線維持制御。白線を認識、先頭車または先行車への追従走行、車線維持、車線変更を行う機能。ミリ波レーダー、LiDER、GPSセンサーを駆使し、ECUの計算により、白線未検出時や、車線変更時にも、先頭車と自車の誤差...
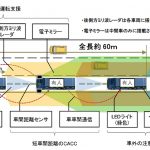
協調型車間距離維持支援システム(CACC:Cooperative Adaptive Cruise Control)は、隊列走行の2号車などで使用する。 従来の ACCオートクルーズシステム で用いられている先行車との車間距離情報に加え、車車...
短車間距離(最長 10m)で、電子的に連結して走行するシステム。 後続車無人システムともいう。物理的な連結がなく、有人の先頭車が、無人のトラック、1 台または複数台を従えて走るシステム。トラックドライバーの不足に対応する。 2号車に、協調型...

ハンズオフの高速走行ができる前走車追従型クルーズコントロール(ACC)機能。 前走車追従型クルーズコントロール(ACC)に、電動パワーステアリング制御、カーブ速度コントロールを追加し、直線やコーナーでも車線の中央付近を維持して走行する 。 ...