車間距離(加速度)制御システム
適切な車間距離を保つために.予め設定した車速でクルマを自動的に加減速させるシステム。 前走車との適切な車間距離を維持しながら追従走行しドライバーの運転負荷を軽減する。
車間距離制御システムは 当初は、高速道路を中心とした快適装備のクルーズコントロールとして普及した。システムの制御対象はエンジンの出力制御のみで、レーダーによって前方を走行する車との車間距離を感知し、その変化に応じて、すでにバイワイヤー化されているエンジン制御による加速とエンジンブレーキによる減速で制御されていた。
現在は、センサー機能が改良され車線感知や障害物および歩行者の感知機能を備え、さらに、バイワイヤー化されたトランスミッション、ステアリング、ブレーキを組み合わせ、ギアチェンジ、ハンドル操作、ブレーキ操作までを自動化するシステムへと進化している。
将来は、市街地での低速走行にも対応したり、前方だけでなく後方車両への対応を行うなど、予防安全を意識した自動運転へ向かって進化している。
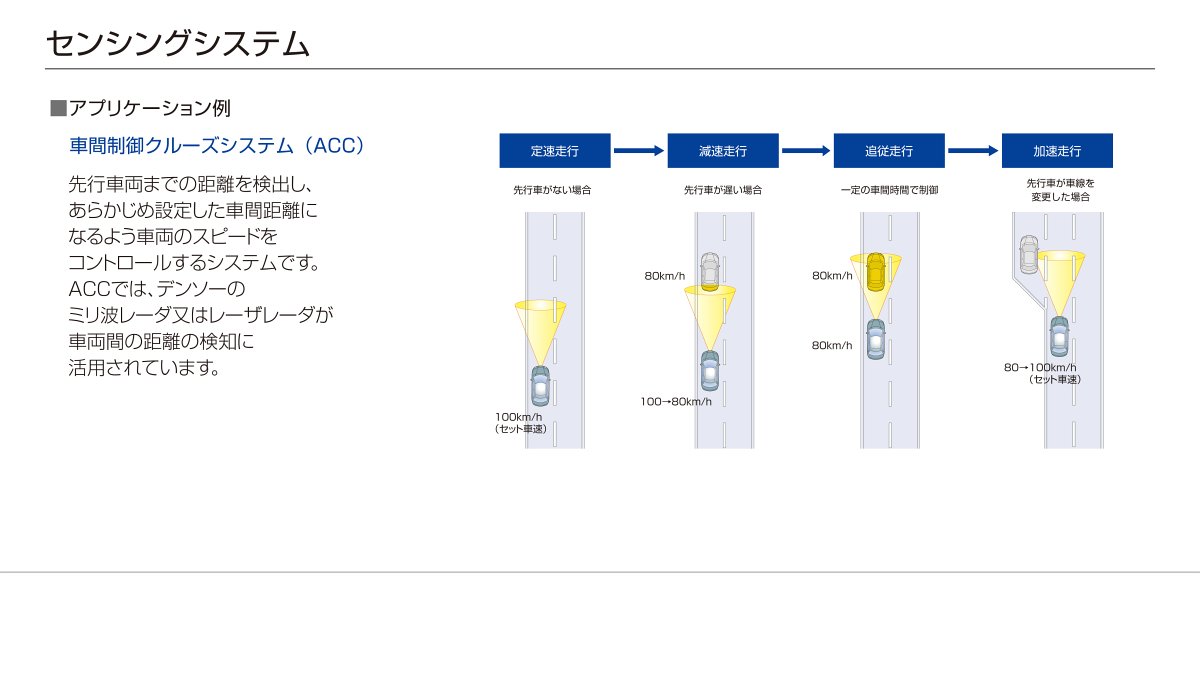
画像はデンソーセンシングシステム(車間制御クルーズシステム(ACC))2013人とくるまのテクノロジ―展より
構成
前方レーダー+オートクルーズコントロールシステム